Masters Student @ University of Bonn | B.Tech in Mechanical Engineering @ IIT Delhi
I'm interested in the future of SLAM, all forms of augmented reality, world models, and their application in solving human and robotics problems.
My Photos
Recent Updates
-
July '25
Completed my Masters in Geodetic Engineering (Mobile Sensing and Robotics) from the University of Bonn
-
August '24
Attended the IEEE RAS Summer School on Multi-Robot Systems, Prague, Czech Republic
-
Jun '24
Joined Agrobotics Lab, UniBonn as a Student Assistant
-
Jan '23
Joined Stachniss Lab, UniBonn as a Student Assistant
-
Oct '22
(present) Joined Masters in Mobile Sensing & Robotics at University of Bonn
-
May '22
Joined RRC in IIIT-Hyderabad as a Project Assistant
-
Sept '22
Joined IHFC as a Research & Entrepreneurship Development Intern (1st co-hort)
-
Sept '22
Joined Indo-Korea Joint Network on Robotics as a Project Assistant (IIT-Delhi)
-
Jan '22
Joined Vecros (startup) as a Hardware Design Engineer
-
June '21
Graduated with a Bachelors Degree in Mechanical Engineering, IIT Delhi
-
May '19
Assumed multiple leadership roles at Aeromodelling Club - IIT Delhi
-
May '18
Awarded with Design Innovation Summer Award, 2018 - IIT Delhi
-
June '17
Joined IIT Delhi for my Bachelors degree in Mechanical Engineering
Personal Projects
Stereo Depth Completion for Aria Glasses [IN PROGRESS]
Estimating Multiview Stereo Depth from slam cameras present on the Meta Aria Glasses .
Implemented differential camera models for Pinhole, Spherical, and Fisheye lenses. View on GitHub
RGB-D SLAM in Dynamic Environments using Segment Anything Model
Building a Map of the environment has been an important step in many downstream robotics tasks. Having a distractor free dense photorealistic map is now possible with GS and SAM. Note - Video shown is from GS-SLAM work.

Instance Completion and Motion Estimation with Deep Shape Priors for Autonomous Driving
The main contribution of this project is an object tracking and reconstruction approach that combines learned deep shape priors with classical 3D object detection for improved perception in autonomous driving.
2D SLAM Implementation on Robomuse Robot
I worked on implementing GMapping and AMCL for Robomuse, a differential robot. This involved assembling the robot and creating the URDF of the robot for simulation. This was the first time I got introduced to SLAM. But only later when I joined UniBonn, I grasped the relevant math.
Professional Experience

Duration: Jan '23 - Jan '24
Worked on setting up Husky robot with multiple RealSense cameras, GNSS receivers, and a Lidar using Docker. Contributed to advanced robotics research in photogrammetry and robotics.
Duration: May '22 - Sept '22
Worked briefly at RRC, IIIT Hyderabad under Prof. Madhava Krishna as a student assistant where I worked on tasks ranging from assembling drones to testing various autonomous mapping/planning pipelines on the lab's drones.

Duration: Sept '22 - Oct '22
Joined a start-up incubation centre as a resident to build drones that can be used to build maps for construction/survey industries. Later realized that it is more optimal to pursue higher education in SLAM which will allow building much better systems.

Duration: Sept '22 - Dec '22
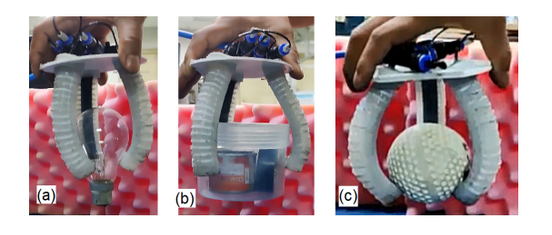
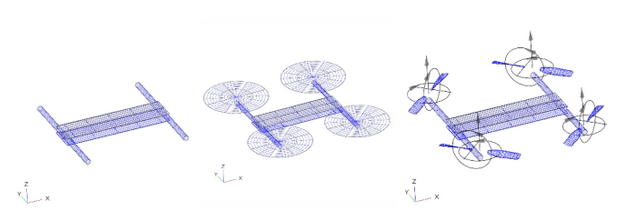
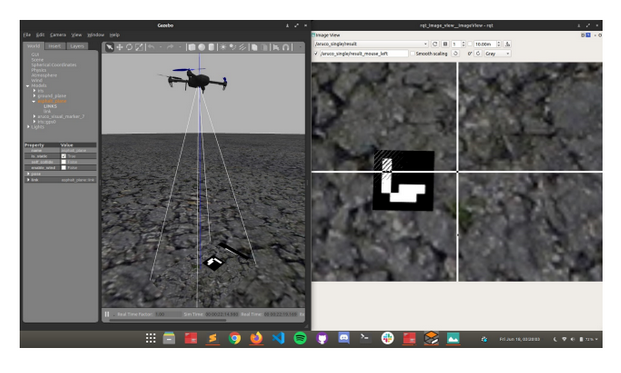
Developed a drone + manipulator system to pick and carry a payload of 500g. Implemented ArUco Marker detection and landing for this drone system.

Duration: May '19 - June '21
Assumed multiple leadership roles at Aeromodelling Club. My team won the 1st prize of ₹50,000 for designing a model aeroplane with the highest payload/weight ratio.